网站地图
网站地图
直流电机定位:实现直流电机的高精度定位控制
直流电机的高精度定位控制一直是工业自动化领域的重要问题之一。在大多数情况下,高精度定位控制涉及到直流电机的位置、速度和加速度等参数的精确控制。本文将讨论直流电机定位的基本原理、控制方法以及实现高精度定位控制的关键技术。
一、直流电机定位的基本原理
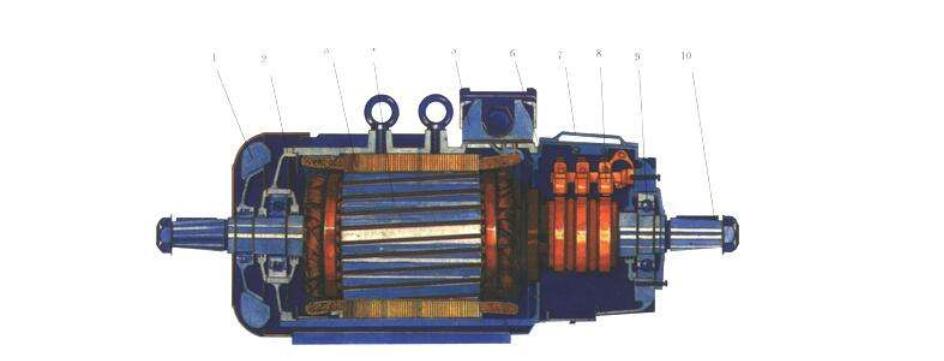
直流电机是一种将直流电转换为机械能的设备。它的工作原理基于洛伦兹力,即当磁场中带电粒子受到电磁力作用时,会在磁场中运动。在直流电机中,电枢绕组与永磁体或电磁体之间存在磁场,当电枢绕组中通入电流时,会在它周围产生一个磁场。磁场中的电流受到洛伦兹力的作用而旋转,从而驱动电机的转子旋转。
定位控制是指精确控制电机的位置和速度,以实现精确的运动控制。在直流电机的定位控制中,主要涉及到位置传感器、控制器和功率放大器等。位置传感器用于检测电机的位置,控制器用于计算电机的位置误差,并输出控制信号,功率放大器用于将控制信号转换为电机的驱动信号。
二、直流电机定位的控制方法
直流电机的定位控制方法主要包括开环控制和闭环控制两种。
1. 开环控制
开环控制是指在没有反馈控制的情况下,通过给定的控制信号直接控制电机的转动。在开环控制中,控制信号通常是电压或电流信号,它们的大小和方向决定了电机的转速和转向。由于开环控制没有反馈控制,所以无法对电机的位置误差进行修正,因此无法实现高精度的定位控制。
2. 闭环控制
闭环控制是指在有反馈控制的情况下,通过对电机的位置误差进行修正,实现精确的运动控制。在闭环控制中,位置传感器用于检测电机的位置,并将检测到的位置反馈给控制器。控制器根据反馈信号计算位置误差,并输出相应的控制信号。控制信号通常是电流或电压信号,它们的大小和方向决定了电机的转速和转向。在闭环控制中,位置误差不断被修正,从而实现高精度的定位控制。
三、实现直流电机的高精度定位控制的关键技术
实现直流电机的高精度定位控制需要掌握一些关键技术,包括位置传感器、控制算法和功率放大器等。
1. 位置传感器
位置传感器是实现直流电机定位控制的关键部件之一。位置传感器通常使用光电编码器、霍尔传感器或磁性传感器等。它们的作用是检测电机的转子位置,并将检测到的位置反馈给控制器。
2. 控制算法
控制算法是实现直流电机定位控制的另一个重要部分。控制算法通常采用PID控制算法或模糊控制算法等。PID控制算法是一种经典的控制算法,它根据位置误差、速度误差和加速度误差计算控制信号。模糊控制算法是一种基于模糊逻辑的控制算法,它将位置误差、速度误差和加速度误差映射为模糊值,并根据模糊值计算控制信号。控制算法的选择应根据具体的应用场景和性能要求进行。
3. 功率放大器
功率放大器是将控制信号转换为电机驱动信号的重要部件。功率放大器通常使用MOSFET或IGBT等半导体器件。功率放大器的选择应根据电机的功率和转速要求进行。
本文讨论了直流电机定位的基本原理、控制方法和实现高精度定位控制的关键技术。直流电机定位控制是工业自动化领域的重要问题之一,实现高精度定位控制可以提高工业生产的效率和质量。在实际应用中,应根据具体的应用场景和性能要求选择合适的位置传感器、控制算法和功率放大器等,以实现更加精确的运动控制。